Things are kind of slow around here while my mount is still away (I promise to post lots about this soon!). So, it's time for a little indoor project that I have been thinking about for a while now. I wanted a "hands-off" focus control for my telescope, something I wouldn't have to touch which causes vibrations. I also wanted a way to return to a known point of focus, which is important whenever you change cameras or add a reducer or barlow. Every time you change something the focuser must be moved to reach focus again. This becomes more of an issue with a Schmidt-Cassegrain telescope because the focus knob, which moves the primary mirror, can be turned about a million times without any indication of where you are (or more correctly - where the mirror is at). My other focusers don't move so much, and have a scale engraved on them which helps me find the right focus. (NOTE: my Celestron C8 has a built-in focuser - the one I am talking about now - but I also have an additional Crayford focuser on the C8 for fine focusing, as well as a similar Crayford focuser on my ZS80FD) Touching any of the focusers causes vibrations in the entire rig, not to mention the fact I have to get up out of my chair. After researching around the Internet, I decided that a stepper motor with electronic control was easy enough for me to build, and affordable. I got most of my inspiration from
this site. The stepper motor kit shown on that site is no longer available, so I found another kit
here. It's not quite the same, so we will see how it works out.

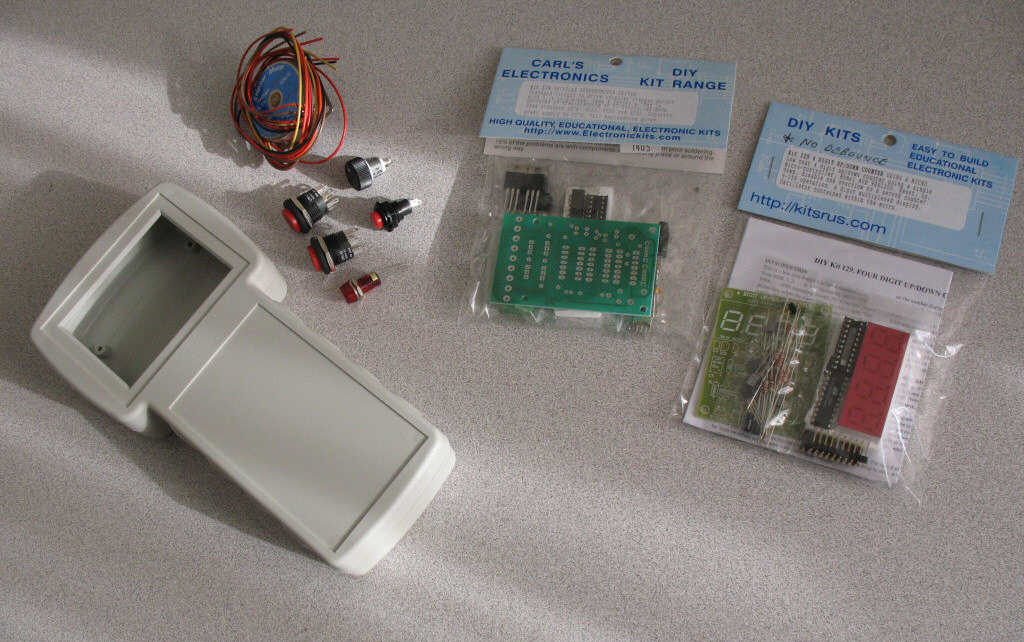
Above are the parts I have purchased so far, mostly from
Mouser Electronics. The display/counter kit was purchased from
Ozitronics down in Australia. If you contact Frank there, he will program the circuit for no debounce, which is important for the operation of the focus control system.

Here's the schematics of the stepper driver kit, and counter/display kit. I chose kits instead of building from scratch because it saves loads of time. I am still trying to figure out the best way to interface these two circuits, but it shouldn't be too hard.


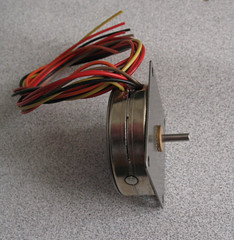
Here's a couple view of the stepper motor. It's a 12VDC motor with 100 steps per revolution. I actually bought two just in case (they are cheap!). To attach the motor to the focuser, I'll use a mechanical coupler like this:

Beyond that, a bracket will need to be fabricated to secure the motor assembly to the focuser. I still haven't figured that out yet. I hope to get started on this project soon. If this works well I will put stepper motors on everything for the ultimate lazy-man's setup. Later I will take it another step by making everything computer-controlled. My ultimate goal is to eventually control everything remotely from inside. Or am I getting too lazy? Hmmm...